Die Technologie der Schaltnetzteile hat sich in den letzten Jahren mit der Entwicklung hochintegrierter Chips in Richtung Miniaturisierung, hoher Frequenz und hoher Effizienz entwickelt. Hochintegrierte Steuerchips vereinfachen die erforderlichen Peripheriekomponenten, da es mit entsprechender Designsoftware relativ einfach ist, ein Schaltnetzteil zu entwerfen. Das Problem der hohen Integration führt jedoch zu geringer Gestaltungsfreiheit, niedriger Verfügbarkeit der Chips und niedrigen Preisen. Die von den einzelnen Herstellern entwickelte Designsoftware ist nur in der Lage, einige spezielle Chiptypen zu simulieren. In der praktischen Anwendung ist es entscheidend, ein Schaltnetzteil zu entwerfen, das mit den Produktanforderungen kompatibel ist und hervorragende Betriebsbedingungen bietet. Basierend auf den Anforderungen des Leistungsmoduls für RFID wurde ein Schaltnetzteil mit einer Spannung von 220VAC auf 0,5VDC und einer Abmessung von 88mm x 70mm entwickelt. Da der Betriebsstrom beim Auslesen von Tags nahe bei 1,5A liegt, wurde der maximale Ausgangsstrom des entworfenen Schaltnetzteils auf 3A festgelegt.
Beim Entwurf von Miniaturgeräten mit relativ niedriger Ausgangsleistung ist gemäß der Theorie von Erickson R W die Verfügbarkeit des Leistungsschalters bei Flyback-Schaltnetzteilen mit 0,385 höher als bei der Verwendung des normalen Schaltmodus, Vollbrücke und Halbbrücke, die jeweils 0,353 beträgt. Daher wird die Flyback-Wandler-Struktur ausgewählt. Unter Berücksichtigung der Vorteile des Feedback-Designs und des Stromregelungsmodus wird der PWM-Steuerchip im Stromregelungsmodus UC3842 ausgewählt.
Beim Einsatz des Chips UC3842 in Schaltnetzteilen ist das Design der Peripherieschaltung relativ einfach. Die Strommodus-PWM-Steuerchip-Struktur eliminiert die durch die Induktivität in der Schleife verursachten Doppelpole, um das Design der Rückkopplungsschleife effektiv zu vereinfachen. Am Ausgang wird eine Rückkopplung mit einer Stabilivoltdiode TL431 und einem Optokoppler verwendet. Beim Design auf Basis des UC3842 neigen Entwickler dazu, jedes Modul in der Flyback-Struktur unabhängig zu entwerfen, wobei der Schwerpunkt auf dem Design der angrenzenden Schaltung und der Rückkopplungsschaltung liegt, während andere Schaltungsdesigns vernachlässigt werden. Beispielsweise muss gemäß dem Zusatzgliedersatz von Dr. Middlebrook der Eingangswiderstand des Eingangsfilters deutlich kleiner sein als der Eingangswiderstand des Wandlers. Andernfalls kann es zu Schwankungen in der Schaltung kommen. Dieses Design behandelt sorgfältig das Design angrenzender Schaltungen wie das Design des Eingangsfilters, die Steigungskompensation und das Massekonzept. Das Designschema wird durch Saber-Simulation bestimmt und seine Kompatibilität mit den Anforderungen sowie die Stabilität durch Debugging mit RFID überprüft.
Grundlagen der Flyback-Schaltnetzteiltheorie
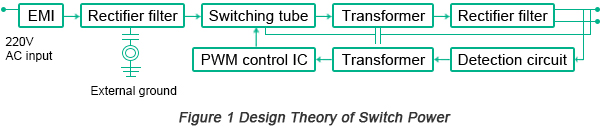
Die grundlegende Design-Theorie von Schaltnetzteilen besteht darin, Wechselstrom (VAC) in Gleichstrom (VDC) umzuwandeln, um die Stromversorgung für den IC-Chip bereitzustellen, der den Gleichstrom in Hochfrequenzwechselstrom (HFAC) umwandelt, welcher anschließend wieder in einen Gleichstromausgang umgewandelt wird. Eine Rückkopplung stabilisiert die Ausgangsspannung durch eine Probe des Ausgangsgleichstroms und steuert den Schalter des Eingangs-ICs. Die Theorie des Schaltnetzteils ist in Abbildung 1 dargestellt.
Die aktuelle Modus-Doppelregelkreisstruktur wird im Steuerwandler des Flyback-Schaltnetzteils angewendet. Das Merkmal des Flyback-Wandlers besteht darin, dass im geschlossenen Zustand des Schalttransistors die Induktivitätsenergie in den Spulen auf einer Seite des Transformators über die Gleichrichterdiode Energie für die Last bereitstellt, während im offenen Zustand des Schalttransistors Energie in der Spule des Transformators gespeichert wird und der Ausgang durch die im Ausgangskondensator gespeicherte Energie bereitgestellt wird. Das Schaltbild des Flyback-Wandlers ist in Abbildung 2 dargestellt.
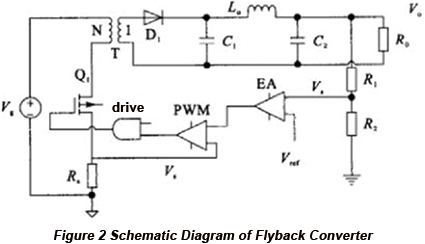
Wenn die von den Ausgangserkennungswiderständen erfasste SpannungR1undR2ist kleiner als die ReferenzspannungVref, der Fehler steigt durch den Fehlerverstärker mit SchaltrohrF1offen. Die Primärinduktivität und der Strom des Transformators steigen mit der Steigung von (Vg-Van)/Lm. AbtastwiderstandRswandelt die Primärinduktivität und den Strom in eine Abtastspannung um. Basierend auf dem Vergleich zwischen der Abtastspannung am AbtastwiderstandRsund Fehlerspannung, wenn die Spannung am MesswiderstandRssteigt auf einen Wert, der höher als die Fehlerspannung ist, wird ein niedriger Pegel ausgegeben und der Schalttransistor bleibt geschlossen, bis der nächste Taktimpuls kommt. Flyback-Schaltnetzteile benötigen keine Ausgangsleistungsdrossel, und die Induktivität des Transformators kann direkt für die Leistungsübertragung verwendet werden, was eine einfache topologische Struktur ermöglicht. Die Steuerschaltung basiert hauptsächlich auf dem Strommodus-PWM-Chip UC3842 und der zugehörigen Peripherieschaltung.
Aktueller Modus PWM-Chip UC3842
Die in diesem Design verwendete Steuer-CPU ist der PWM-Chip UC3842 im Modus mit fester Frequenz und Strom, der wichtige Steuerungskomponenten wie Oszillator, Fehlerverstärker, PWM-Komparator und SR-Trigger integriert. Dieser Chip verfügt über Unterspannungs- und Überstromschutzfunktionen mit einem Ausgang im Totem-Pole-Modus, einer Arbeitsfrequenz von 500 kHz, einem Startstrom von weniger als 1 mA und einem maximalen Ausgangsstrom von 1 A.
Die Funktionen der Pins unterscheiden sich voneinander. Pin 7 ist für die Stromversorgung. Wenn die Spannung den Softstart-Schwellenwert von 16V überschreitet, gibt der Schmitt-Trigger ein High-Level-Signal aus. Der Spannungsregler liefert eine Referenzspannung von 5V an Pin 8, und wenn die Spannung unter 10V liegt, gibt der Schmitt-Trigger ein Low-Level-Signal mit Unterspannungssperre aus. Die interne Stabilisierungsdiode begrenzt die maximale Eingangsspannung auf 36V. Strom wird zugeführt anCtüber Pin 4 durch einen externen RC-Kreis und über Pin 8 durch einen WiderstandRtundCtBestimmt die Frequenz des Oszillators durch eine interne Stromquelle, die Elektrizität erzeugt. Pin 2 ist der invertierende Eingang des Fehlerverstärkers, während Pin 1 der Ausgang des Fehlerverstärkers ist, um die Kompensation bereitzustellen. Pin 3 ist der Stromerkennungspin, der den Tastgrad durch den Ausgang des Fehlerverstärkers bestimmt; wenn die Spannung an Pin 3 mehr als 1 V beträgt, wird der Stromfluss unterbrochen. Pin 6 liefert einen Totempfahl-Ausgang mit einem maximalen Arbeitsstrom von 1A und beschleunigt das Abschalten des Schalttransistors.
Entwurf der Flyback-Schaltleistungssteuerung
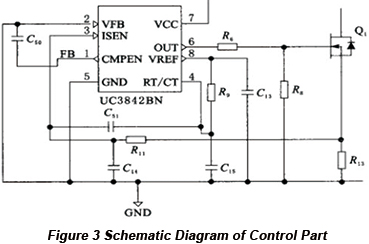
Das schematische Diagramm des Steuerungsteils ist unten in Abbildung 3 dargestellt. Der Steuerungsteil des Flyback-Wandlers ist größtenteils im Chip UC3842 integriert, und nur wenige externe Komponenten können die erforderliche Steuerungsfunktion realisieren. Das Hauptsteuerungsfunktionsmodul umfasst Startschaltung, Frequenzgestaltung, Schutzschaltung, Ansteuerschaltung und Steigungskompensation.
• Startschaltung und Frequenzdesign
Die Startschaltung versorgt Pin 7 mit einer Startspannung von mehr als 16V. Beim Systemstart wird Pin 7 durch die Hilfswicklung mit Strom versorgt. Die Arbeitsfrequenz dieses Systems wird durch den Timing-Kondensator und den Widerstand zwischen Pin 8 und Pin 4 bestimmt. Die 5V-Referenzspannung an Pin 8 versorgt den Kondensator.C15durch WiderstandR9. KondensatorC15erzeugt dann eine Sägezahnwelle durch eine interne Stromquelle, deren Zeitspanne die Totzeit des vom Chip ausgegebenen PWM bestimmt. Um die Leistung sicherzustellen, sollte die Totzeit 5 % kürzer als die Oszillationsperiode sein. Basierend auf dem Zeitablaufdiagramm kann festgestellt werden, dassC15beträgt 3,3 nF und die Arbeitsfrequenz 47 kHz. Gemäß der Formelfosc= 1,7/(RrefxC15), der Wert vonR9ist 11 kHz.
• Aktuelle Rückkopplungsschaltung
Die aktuelle Foldback-Schaltung des Chips wandelt den Induktorstrom an der Primärseite in die Ausgangsspannung des Spannungs- und Fehlerverstärkers um, die durch den PWM-Komparator über den Überstrom-Erkennungswiderstand realisiert wird. Wenn die Spannung an Pin 3 mehr als 1V beträgt, bricht der Ausgang zusammen. Der Spitzeninduktorstrom soll 1A betragen und der Wert des StromerkennungswiderstandsR13sollte 1Ω betragen. Um das fehlerhafte Abschalten durch den Spitzenstrom der Primärseite des Transformators zu verhindern,R11undC14werden verwendet, um den Spitzenwert zu filtern, und der Spitzenstrom beträgt ungefähr einige hundert Nanosekunden. Unter der Annahme, dass R11 1k und C14 500pF ist, ergibt sich die Zeitkonstante τ =RC= 500ns.
• Treiberschaltung für MOSFET
Die Ansteuerschaltung des MOSFET ist verantwortlich für die hervorragende Wellenform des PWM, insbesondere für die Fallkante. Die serielle Verbindung zwischen Ausgangspin 6 und dem Gate-VorwiderstandR6wird die hochfrequente parasitäre Schwankung verringern, die durch die Eingangskapazität des MOS-Transistors und jegliche serielle Leitungsinduktivität in der Schaltung verursacht wird. Um die PWM-Wellenform des MOS-Transistor-Schalters sicherzustellen, beträgt der Wert vonR6ist immer klein im Bereich von einigen Dutzend bis zu zwanzig Ohm. Der Wert vonR8sollte als Gitter-Entladewiderstand des MOS-Transistors 15 kΩ betragen.
• Hangkompensation
Im Spitzenstromregelungsmodus wird der Spitzenwert des Induktorstroms konstant eingestellt, während der Mittelwert des Induktorstroms nicht konstant ist. Die Änderung des Tastverhältnisses verändert den Mittelwert des Stroms, und der Innenregelkreis der Spitzenstromregelung stellt zwar den Spitzenwert des Induktorstroms sicher, kann jedoch nicht den korrekten Mittelwert des Induktorstroms regeln, der mit der Ausgangsspannung kompatibel ist, was zu einer ständigen Veränderung der Ausgangsspannung führt. Wenn das Tastverhältnis mehr als 50 % beträgt, führt die Schwankung des Induktorstroms zu Oszillationen. In diesem Design ist eine Steigungskompensation erforderlich. Die Anwendung der oberen Steigungskompensation bezieht sich auf das Überlagern einer positiv ansteigenden Spannung auf die Stromabtastsignale. In diesem Design wird eine kapazitive Kompensation angewendet mit einerC51von 100pF, die zwischen Pin 3 und Pin 4 hinzugefügt werden, und das Oszillationssignal des Oszillators versorgtC51und Pin 3 über einen Kondensator. Bei dieser Art der Steilheitskompensation ist die Kapazität relativ klein, im Bereich von pF, um zu vermeiden, dass der Strom des Oszillators angezogen wird und eine zu große negative Spannung an Pin 3 entsteht.
Peripherieschaltungsdesign von Flyback-Schaltnetzteilen
• Schaltungsdesign für EMI und Gleichrichterfilter
Um die Störungen des Hochfrequenz-Stromnetzes auf Geräte sowie den Einfluss von Hochfrequenzschaltern auf das Stromnetz zu filtern, sollte eine EMI-Filter-Schaltung am Eingangsbereich angeschlossen werden. Das Schaltbild einer typischen EMI-Filterwelle ist in Abbildung 4 dargestellt.
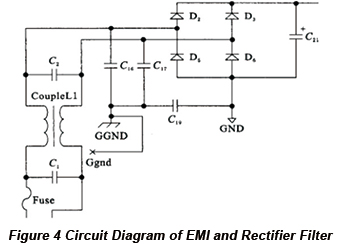
C1ist am Eingangsanschluss des Stromnetzes angeschlossen, währendC2ist mit dem Eingangsanschluss des Geräts verbunden, um Gleichtaktstörungen zu eliminieren.Lteilt die gleiche Richtung wie die Gleichtaktdrossel, um Gleichtaktstörungen zu filtern, währendC16undC17sind mit Masse verbunden, um Gleichtaktstörungen zu filtern.
Der Leckstrom vonC16undC17wird gemäß der Formel berechnet: . Für zwei identische Kondensatoren sollte die Amplitude des Leckstroms der folgenden Formel entsprechen:
. Für zwei identische Kondensatoren sollte die Amplitude des Leckstroms der folgenden Formel entsprechen: , in demfbezieht sich auf die Frequenz des Stromnetzes mit dem Wert von 50 Hz,Cbezieht sich auf die Gesamtkapazität von 4400 pF gegen Masse, undVbezieht sich auf die Erdspannung von 110V. Daher ist der Wert vonIchLeckbeträgt 0,15 mA, was mit dem Wechselstrom mit einem Effektivwert von 220 VAC nach EMI und Sicherheitsstandard kompatibel ist. Die Amplitude beträgt
, in demfbezieht sich auf die Frequenz des Stromnetzes mit dem Wert von 50 Hz,Cbezieht sich auf die Gesamtkapazität von 4400 pF gegen Masse, undVbezieht sich auf die Erdspannung von 110V. Daher ist der Wert vonIchLeckbeträgt 0,15 mA, was mit dem Wechselstrom mit einem Effektivwert von 220 VAC nach EMI und Sicherheitsstandard kompatibel ist. Die Amplitude beträgt während die Ausgangs-DCV ist
während die Ausgangs-DCV ist . Die Sperrspannung der Diode sollte die folgende Anforderung erfüllen:
. Die Sperrspannung der Diode sollte die folgende Anforderung erfüllen: .Cbezieht sich auf die Filterkapazität, währendRLbezieht sich auf die Last. Je größer die ZeitkonstanteRLJe größer die Glättungskapazität C ist, desto besser ist die Filterwirkung. Die Diode 1N4007 mit hoher Spannungsfestigkeit wird ausgewählt.
.Cbezieht sich auf die Filterkapazität, währendRLbezieht sich auf die Last. Je größer die ZeitkonstanteRLJe größer die Glättungskapazität C ist, desto besser ist die Filterwirkung. Die Diode 1N4007 mit hoher Spannungsfestigkeit wird ausgewählt.
• Oszillation, verursacht durch den Ausgangswiderstand des Filters und den Eingangswiderstand des Wandlers
Die Unverträglichkeit zwischen dem Eingangswiderstand des Wandlers und dem Ausgangswiderstand des Filters kann ebenfalls zu Oszillationen führen. Der Eingangswiderstand des Wandlers im Regelkreis kann als negativer Widerstand betrachtet werden ( ). Filter istLCFilter und die Übertragungsfunktion können mit dem ESR der Induktivität und Kapazität erhalten werden.
). Filter istLCFilter und die Übertragungsfunktion können mit dem ESR der Induktivität und Kapazität erhalten werden.

Der Eingangswiderstand des Wandlers bei konstanter Systemoszillation sollte der folgenden Formel entsprechen: .
.
Daher gilt: Nur wenn der Eingangswiderstand des Schleifenwandlers kleiner ist als der berechnete Ausgangswiderstand der Filteroszillation, ist der Dämpfungskoeffizient der Übertragungsfunktion positiv und wird stabil, um die Oszillation zu verringern. Andernfalls wird die Schaltung schwanken.
• Snubber-Schaltungsdesign
Um zu verhindern, dass das Frequenzrohr durch Abschaltüberspannung zerstört wird, muss am Transformator ein primärer RCD-Snubber-Kreis angebracht werden. Der Ausgangsanschluss schaltet die Ausgangsdiode ab, um einen harten Durchbruch zu verhindern, wobei ein Ausgangs-Snubber-Kreis hinzugefügt wird, wie in Abbildung 5 dargestellt.
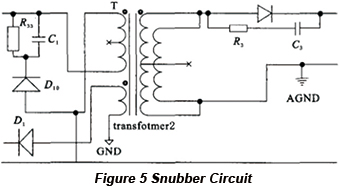
Im Prozess des Durchbruchs des MOS-Transistors fließt der Strom der Primärseiteichdversorgt die parasitäre Leckquellenkapazität über die Primärseite des Transformators mit Strom. Diese Hochfrequenzspannung kann dazu führen, dass die Spannung am Schalttransistor die Durchbruchspannung überschreitet und den Schalttransistor zerstört. Daher wird ein RCD-Snubber-Kreis hinzugefügt, um einen Spannungsableitpfad bereitzustellen. Es wird eine schnelle Rücklaufdiode FR107 mit hoher Durchbruchspannung verwendet, ein RCD-Widerstand von 5 kΩ und eine Kapazität von 3300 pF.
Wenn der Eingang offen ist und der MOSFET geöffnet ist, wird die Spannung an der Ausgangs-Schottky-Diode angelegt ( ) und der harte Durchbruch des MOS-Transistors führt zum Durchbruch der Diode. Mit hinzugefügtem RC-Snubberschaltkreis wird die Spannung an der Schottky-DiodeVD=VO+IchOxR3. Die Einschaltzeit des MOSFETs 2SK792 beträgt 55 ns, die Sperrspannung der Schottky-Diode SB540 beträgt 60 V, AusgangVObeträgt 5V und der maximale Strom beträgt 3A. Daher beträgt der äquivalente Widerstand des maximalen Snubber-Schaltkreises 18,33Ω und (
) und der harte Durchbruch des MOS-Transistors führt zum Durchbruch der Diode. Mit hinzugefügtem RC-Snubberschaltkreis wird die Spannung an der Schottky-DiodeVD=VO+IchOxR3. Die Einschaltzeit des MOSFETs 2SK792 beträgt 55 ns, die Sperrspannung der Schottky-Diode SB540 beträgt 60 V, AusgangVObeträgt 5V und der maximale Strom beträgt 3A. Daher beträgt der äquivalente Widerstand des maximalen Snubber-Schaltkreises 18,33Ω und ( ). Wenn R 18Ω und C 560pF beträgt, ist der äquivalente Serienwiderstand 18,06Ω.
). Wenn R 18Ω und C 560pF beträgt, ist der äquivalente Serienwiderstand 18,06Ω.
• Ausgangsschaltungsdesign
Die Gleichrichtung wird durch den Ausgangsteil mittels Schottky-Diode realisiert, und die Filterung erfolgt durch einen Kondensator mit niedrigem ESR, wobei der äquivalente ESR des Kondensators den Ausgang reduziert, wie in Abbildung 6 gezeigt.
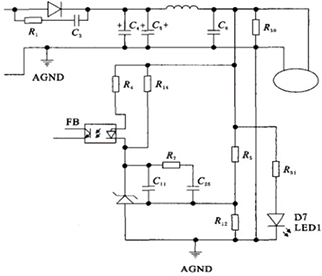
Ausgangsabtastschaltungen werden erhalten durchR5undR12Differenzialspannung und der Wert vonR12wird mit Bezug auf den Ausgangsstrom des TL431 bestimmt, der 1,5 μA beträgt. Um zu vermeiden, dass der Strom das Differenzspannungsverhältnis und das Rauschen beeinflusst, fließt der Strom durch den WiderstandR12sollte mehr als das 100-fache des Eingangsstroms des TL431 betragen. Rlow<2,5/150μA=16,6kΩ. Da der Arbeitsstrom des TL431 im Bereich von 1mA bis 100mA liegt, wenn der Strom vonR5ist nahezu 0, wird dem TL431 ein Strom von 1 mA zugeführt durchR14(R14<Uf/1mA). Basierend auf dem Handbuch des PC817B,Uf= 1,15 V, der Wert vonR14kann 1 kΩ sein, da sein Wert weniger als 1,15 kΩ betragen sollte.
Basierend auf den Kennlinien des Transistors im PC817B beträgt bei einem Vorwärtsstrom des Transistors von etwa 7 mA der Wert vonIchCbeträgt ebenfalls 7 mA und die Emitterspannung ist innerhalb einer relativ breiten Kategorie mit uc3842comp linear linear. Der CTR im PC817B liegt im Bereich von 1,3 bis 2,6. Wenn der Wert vonIchCbeträgt 7 mA, wobei im schlimmsten Fall ein CTR-Wert von 1,3 berücksichtigt wird. Der maximale durch die LED fließende Strom muss seinIchf=IchC/1,3 = 5,38 mA,R4<(5 -Uka-Uf)/5,38mA = (5 - 1,15 - 2,5)/5,38mA = 250Ω. Der maximale Strom, den der TL431 aushalten kann, beträgt 150mA, während der maximale Strom, den der PC817 aushalten kann, 50mA beträgt. Daher ist der maximale StromR4stellt 50 mA bereit mitR4>(5 - 1,15 - 2,5)/50mA = 27Ω. Also ist der Bereich vonR4liegt zwischen 27Ω und 250Ω, wobei der Wert von 150Ω ausgewählt wurde.
• Entwurf der Erdungsschaltung
Der Transformator wird als Isolator zwischen kaltem und heißem Erdpotential im Schaltnetzteil eingesetzt. Das heiße Erdpotential auf der Primärseite des Transformators kann durch das Stromnetz einen Kreis bilden, und der Sekundärtransformator bezieht sich auf den Kreis, der durch kaltes Erdpotential und Erde gebildet wird. SicherheitskondensatorYwird abgeholt vonC16undC17Um die Nullleitung und die Phasenleitung mit dem Rahmen zu verbinden, um Gleichtaktstörungen zu filtern. KondensatorC18Zwischen heißer Masse und kalter Masse wandelt sich das Rauschen auf der Sekundärseite des Transformators in einen Kurzschluss auf der Primärseite um, um die Abstrahlung elektromagnetischer Wellen zu reduzieren.
Hilfreiche Ressourcen
•Eine umfassende Einführung in das IoT auf Basis von RFID
•Entwurf von Hochleistungs-Leiterplatten in Hochtemperaturumgebungen
•Wie man Erdungsfehler der Steuerstromversorgung basierend auf Isolationsverringerung im PCB-Design beseitigt
•Diskussion über Strom- und Masseführung in der elektromagnetischen Verträglichkeit von Leiterplatten
•Wie man die Impedanz von Hochgeschwindigkeits-PCB-Stromversorgungen analysiert und verhindert
•Aluminium-beschichtete Leiterplatten: Die Lösung für Hochleistungs- und Präzisionsanwendungen
•Vollständiger Leiterplatten-Fertigungsservice von PCBCart – Zahlreiche Mehrwertoptionen
•Fortschrittlicher Leiterplattenbestückungsservice von PCBCart – Beginnend ab 1 Stück












