Negli ultimi anni, la tecnologia degli alimentatori switching ha conosciuto uno sviluppo verso la miniaturizzazione, l’alta frequenza e l’elevata efficienza grazie all’evoluzione dei chip altamente integrati. I chip di controllo altamente integrati rendono più semplici i componenti periferici richiesti, poiché è relativamente facile progettare un alimentatore switching utilizzando il software di progettazione. Tuttavia, l’elevato livello di integrazione comporta una ridotta libertà di progettazione, una scarsa disponibilità di chip e un prezzo contenuto. Il software di progettazione sviluppato da ciascun produttore è in grado di simulare solo alcuni tipi di chip particolari. Nelle applicazioni pratiche, è fondamentale progettare un alimentatore switching compatibile con le esigenze del prodotto e con eccellenti condizioni di funzionamento. In base ai requisiti del modulo di alimentazione per RFID, è stato progettato un alimentatore switching con una tensione da 220 VAC a 0,5 VDC e dimensioni di 88 mm x 70 mm. Poiché la corrente di esercizio si avvicina a 1,5 A durante il processo di lettura dei tag, la corrente massima di uscita dell’alimentatore switching progettato è impostata a 3 A.
Nel progetto di un convertitore in miniatura con potenza di uscita relativamente bassa, secondo la teoria di Erickson R. W., la disponibilità dell’interruttore di potenza dell’alimentatore flyback, pari a 0,385, è superiore a 0,353, valore che si ottiene utilizzando i tipi a commutazione normale, a ponte intero e a mezzo ponte. Pertanto, viene adottata la struttura del convertitore flyback. Tenendo in considerazione i vantaggi della progettazione con retroazione e del controllore in modalità di corrente, viene scelto il chip di controllo PWM in modalità di corrente UC3842.
Nell’alimentatore switching che utilizza il chip UC3842, la progettazione del circuito periferico è relativamente semplice. La struttura del chip di controllo PWM in modalità corrente elimina il doppio polo introdotto dall’induttanza nell’anello, semplificando efficacemente la progettazione dell’anello di retroazione. Viene adottato uno stile di retroazione sul terminale di uscita costituito dal diodo di riferimento TL431 e da un optoisolatore. Nella progettazione basata su UC3842, i progettisti tendono a progettare in modo indipendente ciascun modulo nella struttura flyback, ponendo l’accento sulla progettazione del circuito adiacente e del circuito di retroazione, trascurando altri circuiti. Ad esempio, secondo il teorema dell’elemento extra del Dr. Middlebrook, l’impedenza di ingresso del filtro di ingresso deve essere molto inferiore all’impedenza di ingresso del convertitore. In caso contrario, il circuito potrebbe andare incontro a oscillazioni. Questo progetto discute con attenzione la progettazione dei circuiti adiacenti, come il progetto del filtro di ingresso, la compensazione di pendenza e la progettazione del circuito di massa. Lo schema di progetto viene determinato tramite simulazione con Saber e la sua compatibilità con i requisiti e la stabilità vengono verificate tramite il debug con RFID.
Teoria di base dell’alimentatore flyback a commutazione
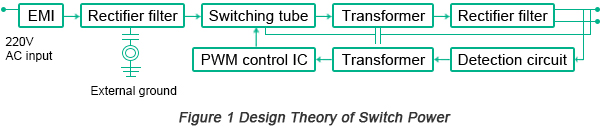
La teoria di base della progettazione dell’alimentatore switching consiste nel trasformare la VAC in VDC per alimentare il chip IC, che converte la corrente continua (DC) in HFAC, la quale viene poi riconvertita in uscita DC. Il feedback stabilizza la tensione di uscita a partire dal campione di DC in uscita e dal controllo dell’interruttore da parte dell’IC in ingresso. La teoria dell’alimentatore switching è illustrata nella Figura 1.
Nella modalità corrente viene applicata una struttura a doppio anello chiuso nel convertitore di controllo dell’alimentatore switching flyback. La caratteristica del convertitore flyback risiede nel fatto che, quando il transistor di commutazione è in stato di chiusura, l’energia di induttanza all’interno degli avvolgimenti su un lato del trasformatore fornisce potenza al carico attraverso il diodo raddrizzatore, mentre, quando il transistor di commutazione è in stato di apertura, l’energia viene immagazzinata all’interno dell’avvolgimento del trasformatore e l’uscita è fornita dall’energia immagazzinata nel condensatore di uscita. Lo schema a blocchi del convertitore flyback è illustrato in Figura 2.
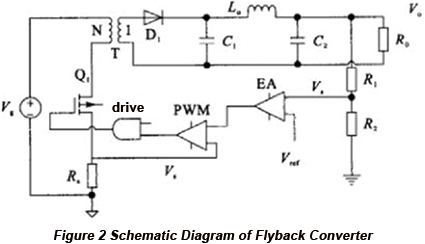
Quando la tensione rilevata dalle resistenze di rilevamento dell’uscitaR1eR2è inferiore alla tensione di riferimentoVrif., l'errore aumenta attraverso l'amplificatore di errore con il tubo di commutazioneD1aperto. L'induttanza primaria e la corrente del trasformatore aumentano con la pendenza di (Vg-Vsu)/Lm. Resistenza di campionamentoRstrasforma l'induttanza primaria e la corrente in una tensione di campionamento. In base al confronto tra la tensione di campionamento sulla resistenza di campionamentoRse tensione di errore, quando la tensione sulla resistenza di campionamentoRssale a un valore superiore alla tensione di errore, verrà emesso un livello basso e il transistor di commutazione rimarrà interdetto fino all’arrivo del clock successivo. L’alimentatore switching flyback non richiede un induttore di potenza in uscita e l’induttanza del trasformatore può essere applicata direttamente all’alimentazione, caratterizzata da una struttura topologica semplice. Il circuito di controllo dipende principalmente dal chip PWM in modalità di corrente UC3842 e dal circuito periferico.
Chip PWM a modalità corrente UC3842
La CPU di controllo applicata in questo progetto è il chip PWM UC3842, operante in modalità a frequenza fissa e a corrente, che integra componenti di controllo fondamentali quali oscillatore, amplificatore di errore, comparatore PWM e flip-flop SR. Questo chip è dotato di funzionalità di protezione da sottotensione e sovracorrente, con un’uscita di tipo totem-pole, una frequenza di lavoro di 500 kHz, una corrente di avviamento inferiore a 1 mA e una corrente di uscita massima di 1 A.
Le funzioni dei pin sono diverse tra loro. Il pin 7 è per l’alimentazione. Quando la tensione è superiore alla soglia di avvio lento di 16 V, il trigger di Schmitt emette un livello alto. Il regolatore di tensione fornisce una tensione di riferimento di 5 V al pin 8 e, quando la tensione è inferiore a 10 V, il trigger di Schmitt emette un livello basso con blocco per sottotensione. Il tubo stabilivolt interno limita la tensione di ingresso massima a 36 V. L’alimentazione è fornita aCttramite il pin 4 attraverso un circuito RC esterno e tramite il pin 8 attraverso una resistenzaRteCtdetermina la frequenza dell’oscillatore tramite una sorgente di corrente interna che genera elettricità. Il pin 2 è l’ingresso invertente dell’amplificatore di errore, mentre il pin 1 è l’uscita dell’amplificatore di errore per fornire la compensazione. Il pin 3 è il pin di rilevamento della corrente, che determina il ciclo di lavoro tramite l’uscita dell’amplificatore di errore e, quando la tensione del pin 3 è superiore a 1 V, il flusso di corrente viene interrotto. Il pin 6 fornisce un’uscita in modalità totem-pole con una corrente di lavoro massima di 1 A, accelerando la chiusura del tubo di commutazione.
Progettazione del controllo di potenza dell’interruttore flyback
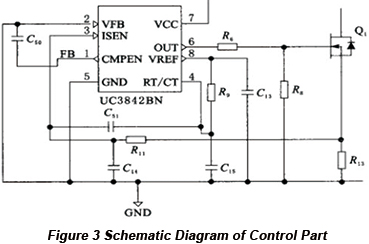
Lo schema a blocchi della parte di controllo è mostrato nella Figura 3 sottostante. La parte di controllo del convertitore flyback è per lo più integrata all’interno del chip UC3842 e solo pochi componenti esterni possono implementare la funzione di controllo richiesta. Il modulo principale della funzione di controllo include il circuito di avviamento, la progettazione della frequenza, il circuito di protezione, il circuito di pilotaggio e la compensazione di pendenza.
• Progettazione del circuito di avviamento e della frequenza
Il circuito di avviamento fornisce al pin 7 una tensione di avviamento superiore a 16 V. Quando il sistema si avvia, l’alimentazione viene fornita al pin 7 dall’avvolgimento ausiliario. La frequenza di lavoro di questo sistema è determinata dal condensatore di temporizzazione e dalla resistenza tra il pin 8 e il pin 4. La tensione di riferimento di 5 V del pin 8 fornisce alimentazione al condensatoreC15attraverso il resistoreR9. CondensatoreC15quindi genera un’onda a dente di sega tramite una sorgente di corrente interna che genera una tensione il cui intervallo di tempo determina il tempo morto dell’uscita PWM del chip. Per garantire le prestazioni, il tempo morto deve essere inferiore del 5% al periodo di oscillazione. In base al diagramma della sequenza temporale, si può ottenere cheC15è 3,3 nF e la frequenza di lavoro è 47 kHz. In accordo con la formulafosc= 1,7/(Rrif.xC15), il valore diR9è 11 kHz.
• Circuito di foldback attuale
Il circuito di foldback attuale del chip trasforma la corrente dell’induttore sul lato primario nella tensione di uscita dell’amplificatore di tensione ed errore, implementata dal comparatore PWM tramite la resistenza di rilevamento della sovracorrente. Quando la tensione del pin 3 supera 1 V, l’uscita si interrompe. La corrente di picco dell’induttore dovrebbe essere di 1 A e il valore della resistenza di rilevamento della correnteR13dovrebbe essere di 1Ω. Per evitare l’arresto per errore causato dal picco di corrente dell’induttore sul lato primario del trasformatore,R11eC14vengono utilizzati per filtrare il picco e la corrente di picco è dell’ordine di centinaia di nanosecondi. Nella condizione in cui si suppone che R11 sia 1k e C14 500pF, la costante di tempo τ =RC= 500 ns.
• Circuito di pilotaggio del MOSfet
Il circuito di pilotaggio del MOSFET è responsabile dell’eccellente forma d’onda del PWM, in particolare del fronte di discesa. Il collegamento in serie tra il pin di uscita 6 e la resistenza di gate in serieR6ridurrà le fluttuazioni parassite ad alta frequenza causate dalla capacità di ingresso del MOSFET e da qualsiasi induttanza in serie dei conduttori nel circuito. Al fine di garantire la forma d’onda PWM di commutazione del MOSFET, il valore diR6è sempre piccolo nell'intervallo da decine a venti ohm. Il valore diR8dovrebbe essere 15 kΩ come resistore di scarico della griglia del tubo MOS.
• Compensazione della pendenza
Nel controllo in modalità a corrente di picco, il valore di picco della corrente dell’induttore è costantemente impostato mentre il valore medio della corrente dell’induttore non lo è. La variazione del ciclo di lavoro modificherà la corrente media e l’anello interno del controllo a corrente di picco garantisce il valore di picco della corrente dell’induttore ma non riesce a controllare il corretto valore medio della corrente dell’induttore compatibile con la tensione di uscita, portando alla variazione continua della tensione di uscita. Quando il ciclo di lavoro è superiore al 50%, l’ondulazione della corrente dell’induttore genererà oscillazioni. In questo progetto è richiesta la compensazione di pendenza. L’applicazione della compensazione di pendenza superiore si riferisce alla sovrapposizione di una tensione a pendenza positiva sui segnali di campionamento della corrente. In questo progetto viene applicata la compensazione capacitiva con unC51di 100 pF aggiunto tra il pin 3 e il pin 4 e il segnale di oscillazione dell’oscillatore fornisce alimentazione aC51e il pin 3 tramite un condensatore. Con questo tipo di compensazione della pendenza, la capacità è relativamente piccola, dell’ordine dei pF, per evitare di attirare la corrente dell’oscillatore e generare una tensione negativa troppo elevata sul pin 3.
Progettazione del circuito periferico dell’alimentatore flyback a commutazione
• Progettazione di circuiti per EMI e filtro raddrizzatore
Per filtrare l’interferenza della rete elettrica ad alta frequenza sui dispositivi e l’influenza dell’interruttore ad alta frequenza sulla rete elettrica, è necessario inserire un circuito di filtro EMI allo stadio di ingresso. Il diagramma del circuito del comune filtro EMI è mostrato in Figura 4.
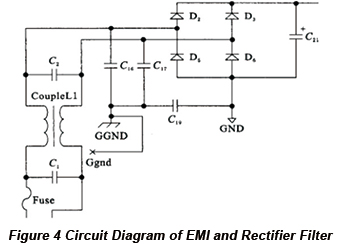
C1è collegato alla porta di ingresso della rete elettrica mentreC2è collegato alla porta di ingresso del dispositivo per eliminare le interferenze in modalità differenziale.Lcondivide la stessa direzione con l’induttanza di modo comune per filtrare le interferenze di modo comune mentreC16eC17sono collegati a terra per filtrare le interferenze in modo comune.
La corrente di perdita diC16eC17è calcolato conformemente alla formula: Per due condensatori identici, l’ampiezza della corrente di perdita deve essere conforme alla formula:
Per due condensatori identici, l’ampiezza della corrente di perdita deve essere conforme alla formula: , in cuifsi riferisce alla frequenza della rete elettrica con il valore di 50 Hz,Csi riferisce alla capacità complessiva di 4400 pF verso massa, eVsi riferisce alla tensione di terra di 110 V. Pertanto, il valore diIoperditaè 0,15 mA, compatibile con la corrente alternata con il valore efficace di 220 VAC dopo la compatibilità EMI con lo standard di sicurezza. L’ampiezza è
, in cuifsi riferisce alla frequenza della rete elettrica con il valore di 50 Hz,Csi riferisce alla capacità complessiva di 4400 pF verso massa, eVsi riferisce alla tensione di terra di 110 V. Pertanto, il valore diIoperditaè 0,15 mA, compatibile con la corrente alternata con il valore efficace di 220 VAC dopo la compatibilità EMI con lo standard di sicurezza. L’ampiezza è mentre il DCV in uscita è
mentre il DCV in uscita è . La tensione di rottura inversa del diodo deve soddisfare il seguente requisito:
. La tensione di rottura inversa del diodo deve soddisfare il seguente requisito: .Csi riferisce alla capacità del filtro mentreRLsi riferisce al carico. Più grande è la costante di tempoRLC è e più regolare è la capacità del condensatore, migliore sarà l’effetto di filtraggio. È stato scelto il diodo 1N4007 con un’elevata tensione di tenuta.
.Csi riferisce alla capacità del filtro mentreRLsi riferisce al carico. Più grande è la costante di tempoRLC è e più regolare è la capacità del condensatore, migliore sarà l’effetto di filtraggio. È stato scelto il diodo 1N4007 con un’elevata tensione di tenuta.
• Oscillazione causata dall'impedenza di uscita del filtro e dall'impedenza di ingresso del convertitore
L’incompatibilità tra l’impedenza di ingresso del convertitore e l’impedenza di uscita del filtro può anch’essa portare a oscillazioni. L’impedenza di ingresso del convertitore del sistema ad anello può essere considerata come una resistenza negativa ( ). Il filtro èLCil filtro e la funzione di trasferimento possono essere ottenuti con l’ESR dell’induttanza e della capacità.
). Il filtro èLCil filtro e la funzione di trasferimento possono essere ottenuti con l’ESR dell’induttanza e della capacità.

L'impedenza di ingresso del convertitore dell'oscillazione costante del sistema deve essere conforme alla formula: .
.
Pertanto, solo se l’impedenza di ingresso del convertitore ad anello è inferiore all’impedenza di uscita di oscillazione del filtro calcolata, il coefficiente di smorzamento della funzione di trasferimento avrà un valore positivo che diventerà stabile al fine di ridurre l’oscillazione. Altrimenti, il circuito oscillerà.
• Progettazione del circuito snubber
Per evitare che il tubo di frequenza venga distrutto a causa della sovratensione di spegnimento, è necessario assemblare al trasformatore un circuito snubber RCD sul lato primario. La porta di uscita interrompe il diodo di uscita per evitare una rottura brusca con l’aggiunta del circuito snubber di uscita, come illustrato in Figura 5.
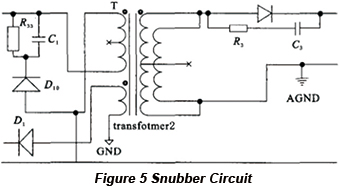
Nel processo di rottura del MOS, la corrente del bordo primarioiodfornisce alimentazione alla capacità di dispersione parassita della sorgente tramite la dispersione di bordo del primario del trasformatore. Questa tensione ad alta frequenza può far sì che la tensione sul tubo di commutazione superi la tensione di tenuta e rompa il tubo di commutazione, quindi viene aggiunto un circuito snubber RCD per fornire un percorso di scarico della tensione. Si sceglie un diodo a recupero veloce FR107 con alta tensione di tenuta, una resistenza RCD da 5 kΩ e una capacità da 3300 pF.
Quando l'ingresso è aperto con il MOSFET aperto, la tensione applicata sul diodo Schottky di uscita ( ) e la rottura grave del MOS porta alla rottura del diodo. Con l’aggiunta del circuito snubber RC, la tensione sul diodo SchottkyVD=VO+IoOxR3. Il tempo di apertura del MOSFET 2SK792 è di 55 ns, la tensione inversa sopportabile del diodo Schottky SB540 è di 60 V, uscitaVOè 5 V e la corrente massima è 3 A. Pertanto, la resistenza equivalente del circuito snubber massimo è 18,33 Ω e (
) e la rottura grave del MOS porta alla rottura del diodo. Con l’aggiunta del circuito snubber RC, la tensione sul diodo SchottkyVD=VO+IoOxR3. Il tempo di apertura del MOSFET 2SK792 è di 55 ns, la tensione inversa sopportabile del diodo Schottky SB540 è di 60 V, uscitaVOè 5 V e la corrente massima è 3 A. Pertanto, la resistenza equivalente del circuito snubber massimo è 18,33 Ω e ( ). Quando R è 18Ω e C è 560pF, la resistenza seriale equivalente è 18,06Ω.
). Quando R è 18Ω e C è 560pF, la resistenza seriale equivalente è 18,06Ω.
• Progettazione del circuito di uscita
La raddrizzazione è implementata dalla parte di uscita tramite un diodo Schottky e il filtraggio utilizza un condensatore con basso ESR, con l’ESR equivalente del condensatore che riduce l’uscita, come mostrato in Figura 6.
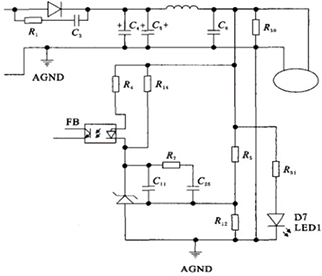
I circuiti di campionamento dell’uscita sono ottenuti tramiteR5eR12tensione differenziale e il valore diR12è determinata con riferimento alla corrente del terminale di uscita del TL431, che è di 1,5 μA. Per evitare che la corrente influenzi il rapporto di tensione differenziale e il rumore, la corrente attraverso il resistoreR12dovrebbe essere superiore a 100 volte la corrente di ingresso del TL431. Rlow<2,5/150μA=16,6kΩ. Poiché la corrente di lavoro del TL431 è compresa tra 1mA e 100mA, quando la corrente diR5è quasi 0, la corrente di 1 mA è fornita al TL431 daR14(R14<Uf/1mA). In base al manuale del PC817B,Uf= 1,15 V, il valore diR14può essere 1 kΩ poiché il suo valore dovrebbe essere inferiore a 1,15 kΩ.
In base alle curve caratteristiche del triodo nel PC817B, quando la corrente diretta del transistor è approssimativamente 7 mA, il valore diIoCè anch’essa 7 mA e la tensione di emettitore è lineare entro una categoria relativamente ampia con il compensatore dell’UC3842 lineare. Il CTR nel PC817B è nell’intervallo da 1,3 a 2,6. Quando il valore diIoCè 7 mA, considerando la situazione peggiore, il valore di CTR è 1,3. La corrente massima che scorre attraverso il LED deve essereIof=IoC/1,3 = 5,38 mA,R4<(5 -Uka-Uf)/5,38 mA = (5 - 1,15 - 2,5)/5,38 mA = 250 Ω. La corrente massima che il TL431 può sopportare è 150 mA mentre la corrente massima che il PC817 può sopportare è 50 mA. Pertanto, la corrente massimaR4fornisce 50 mA conR4>(5 - 1,15 - 2,5)/50mA = 27Ω. Quindi l'intervallo diR4è compreso tra 27Ω e 250Ω con il valore di 150Ω selezionato.
• Progettazione del circuito di massa
Il trasformatore viene applicato come isolatore di massa tra massa fredda e massa calda nell’alimentatore switching. La massa calda sul lato primario del trasformatore può formare un anello attraverso la rete elettrica e il secondario del trasformatore fa riferimento all’anello formato dalla massa fredda e dalla terra. Condensatore di sicurezzaYviene raccolto daC16eC17per collegare il conduttore di neutro e la linea di fase alla massa del telaio per filtrare le interferenze in modo comune. CondensatoreC18tra il terreno caldo e il terreno freddo trasforma il rumore sul lato secondario del trasformatore in un cortocircuito primario per ridurre l’onda elettromagnetica irradiata.
Risorse utili
•Un'Introduzione Completa all'IoT Basato su RFID
•Progettazione di PCB ad alta potenza in ambiente ad alta temperatura
•Come sconfiggere i difetti di messa a terra dell’alimentazione di controllo basati sulla riduzione dell’isolamento nella progettazione PCB
•Discussione su alimentazione e massa nella compatibilità elettromagnetica dei PCB
•Come analizzare e ridurre l’impedenza dell’alimentazione nei PCB ad alta velocità
•PCB con supporto in alluminio: la soluzione per applicazioni ad alta potenza e tolleranze ristrette
•Servizio completo di produzione PCB da PCBCart - Molteplici opzioni a valore aggiunto
•Servizio avanzato di assemblaggio PCB da PCBCart - A partire da 1 pezzo












